소개
메커니즘을 사용 해야 하는 이유는 운동학적 움직임과 간섭 체크를 하기 위함 입니다. 이것 이외에 "측정" 때문에 필요한 경우가 있습니다. 메카니즘 옵션은 Creo를 구매 하면 사용 할수 있는 기본 옵션 입니다. Creo에서 움직이는 부품을 포함한 설계는 "조인트 연결"이라고하는 특별히 패키지 된 "구속 조건 세트 - 조립 조건"를 통해 구속 될 수 있습니다. 부품 사이에 올바른 유형의 조인트 연결을 배치하면 부품이 올바르게 움직일 수 있습니다.(활용을 위해서는 경험이 필요 합니다) 움직이는 부품이있는 기계를 설계 할 때는 설계의 적절한 조립을 확인하고 다른 잠재적 인 문제를 확인하기 위해 일반적으로 동작 분석이 수행됩니다.
Creo에서는 Mechanism 모듈, Mechanica 모듈, 애니메이션 모듈과 같은 모션 분석을 수행 할 수있는 몇 가지 옵션을 사용할 수 있으며 Creo Sketcher 모드에서 2D 분석을 수행 할 수도 있습니다.
Joint Connections 이해
CREO에서 조인트 연결은 움직이는 구성 요소를 연결하는 데 사용할 수있는 특수한 유형의 패키지 구속 조건입니다. 적용된 조인트 연결은 선택한 "구성 요소 간의 상대적인 움직임을 제한"합니다. 구속 조건에 의해 허용되는 각각의 독립적 인 움직임을 자유도 (DOF)라고합니다. 구속 조건이 허용하는 자유도는 아래 그림과 같이 세 개의 수직 축을 중심으로 이동 및 회전이 될 수 있습니다.
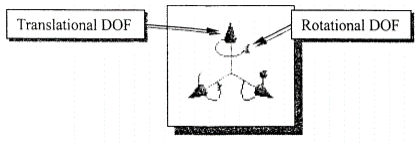
어셈블리의 각 구성 요소에는 6 자유도 (DOF) 또는 단단한 3D 바디가 이동할 수있는 방법이 있습니다. X, Y 및 Z 축을 따라 이동 (이동 자유) 및 X, Y 및 Z 축을 중심으로 회전 (회전 자유). Joint Connection 타입에 따라 아래와 같은 자유도를 가집니다
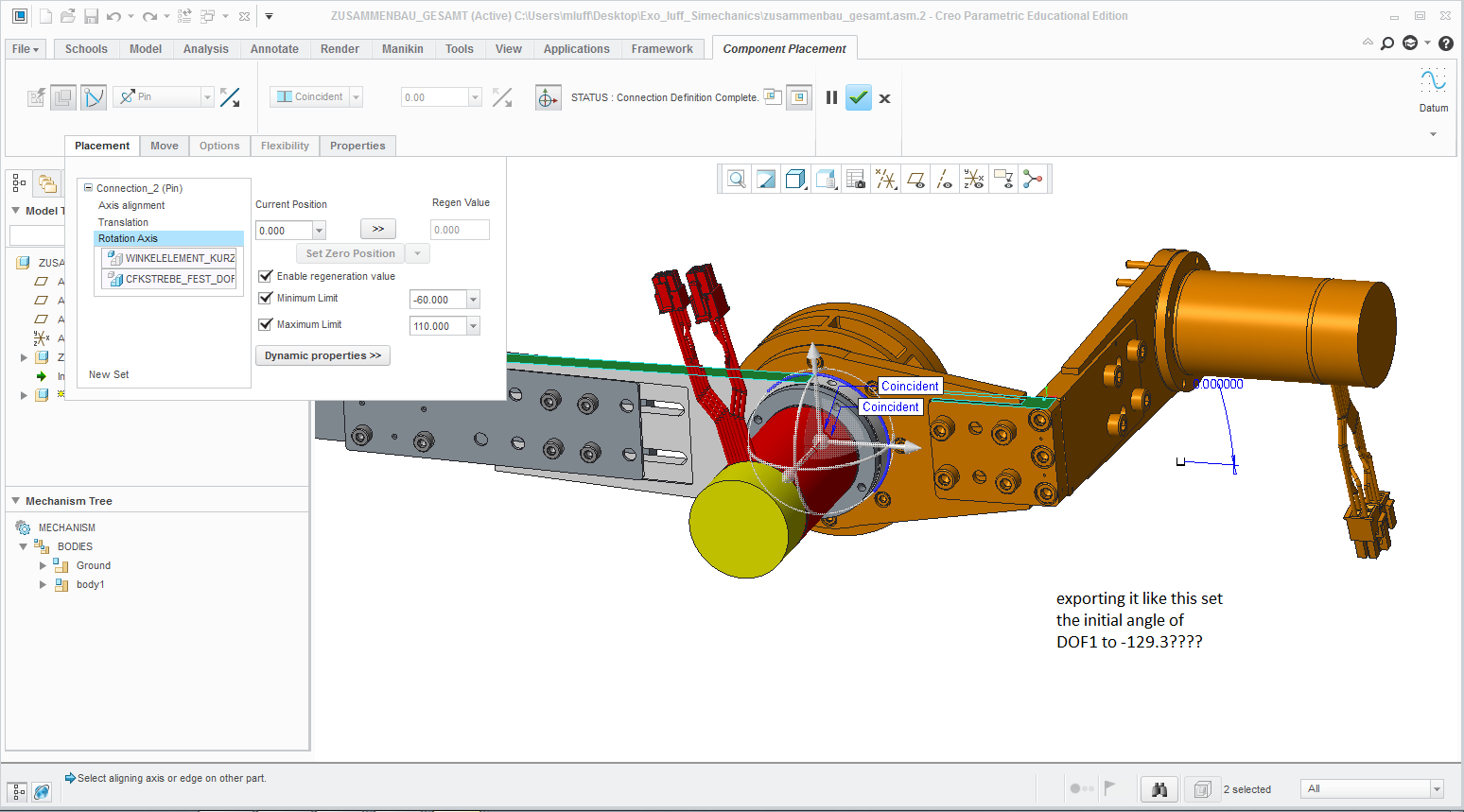
"Mechanism 기능은 우리가 원하는만큼 사용자 친화적이고 자기 설명 적이지 않습니다. - 메뉴얼이 상세하지 않습니다. Creo는 운동 학적 끌기 또는 실행 분석시 구성 요소를 움직일 때 소위 "강체 이론"을 따릅니다. 이 이론은 구성 요소 구조 (모형 트리에 완전히 표시됨 (고정)- Ground Bopy)와 함께 어셈블리에 평행 한 "본체 구조 (Body)"가 있다고 가정합니다. 본체 구조 만 메커니즘 드래그, DOF 또는 잠금 동작을 구성합니다."
메카니즘 기능을 사용 하기 위해 반드시 알고 있어야 할 용어
Servo Motor
서보 모터는 일반적으로 메커니즘에서 특정 모션을 생성하는 데 사용됩니다. 서보 모터를 사용하여 원하는 위치, 속도 또는 가속도를 시간 함수로 지정하여 "구성 요소를 제어" 할 수 있습니다. 제어 된 모션은 병진 또는 회전 모션 일 수 있습니다. 서보 모터는 일반적으로 전자 제어식 전기 모터입니다. 예를 들어 서보 모터는 일종의 서보 컨트로롤 (컴퓨터 제어 장비)러 이고 서보 컨트롤러는 모터 샤프트의 위치를 정확하게 제어 할 수 있습니다. 모터 샤프트는 서보 컨트롤러에 의해 특정 각도 위치에 위치 및 유지 될 수 있습니다.
Body
메커니즘에서 바디는 어셈블리 내 다른 바디와 관련하여 움직이는 단일 강성 구성 요소를 나타냅니다. 바디는 배치 제약 조건을 사용하여 완전히 구속 된 단일 Creo 부품 또는 여러 Creo 부품으로 구성 될 수 있습니다. 3 차원 공간에 배치 된 본체는 3 개의 병진 이동 및 3 개의 회전 자유도 (DOF)를 갖습니다. 즉, 강체는 좌표계의 X, Y 및 Z 축을 따라 이동하고 회전 할 수 있습니다.
Ground Body
그라운드 바디 (또는 프레임)는 어셈블리가 모션을 참조하는 3 차원 공간에서 고정 된 위치를 나타냅니다. 어셈블리에 배치 된 첫 번째 객체는 일반적으로 어셈블리의 고정 참조 여야합니다. Creo 및 애니메이션 모두에서지면 본체를 변경할 수 있지만 일반적으로 조립품을 만들 때지면 조각을 먼저 조립하는 것이 좋습니다.
메커니즘에서 Joint Connections 종류
Pin Connection
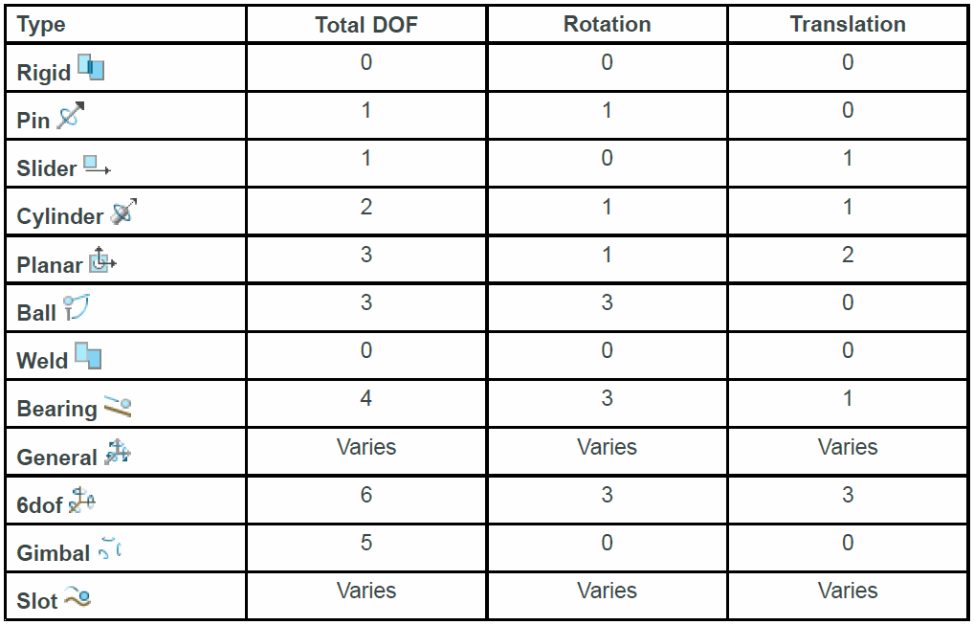
이 유형의 연결을 적용하려면 먼저 이동 구성 요소의 축 (또는 회전 표면)을 조립품에 정렬 한 다음 이동 구성 요소의 평평한 표면 (또는 데이텀 평면)을 조립품에 정렬 / 결합합니다. 두 참조 세트 모두 어셈블리의 동일한 두 구성 요소에 대한 것이어야합니다. 이 연결 유형은 정렬 된 축을 따라 하나의 회전 운동 만 허용합니다.
Slider Connection
이 유형의 연결을 적용하려면 먼저 이동 구성 요소의 축 (또는 모서리)을 어셈블리에 정렬 한 다음 이동 구성 요소의 평평한 표면 (또는 데이텀 평면)을 어셈블리에 정렬 / 결합하십시오. 두 참조 세트 모두 어셈블리에서 동일한 두 구성 요소에 대한 것이어야합니다. 이 연결 유형을 사용하면 (정렬 된 축을 따라) 하나의 회전 운동과 정렬 된 표면에서 두 개의 병진 운동이 가능합니다.
Cylinder Connection
이 유형의 연결을 적용하려면 움직이는 구성 요소의 축 (또는 회전 표면)을 어셈블리에 정렬해야합니다. 구성 요소의 동작을 추가로 제한하기 위해 추가 구속 조건을 적용 할 수도 있습니다. 이 조인트 연결은 정렬 된 축을 따라 하나의 회전 운동과 하나의 병진 운동을 허용합니다.
Planar Connection
이 유형의 연결을 적용하려면 이동 부품의 평평한 표면 (또는 데이텀 평면)을 어셈블리에 정렬 / 결합해야합니다. 구성 요소의 동작을 추가로 제한하기 위해 추가 구속 조건을 적용 할 수도 있습니다. 이 연결 유형을 사용하면 정렬 된 표면에 대해 하나의 회전 운동 (정렬 된 표면에 수직)과 두 개의 병진 운동이 가능합니다
Ball Connection
볼 연결 세트는 구성 요소를 한 지점에 연결하여 3 자유 도로 어떤 방향 으로든 회전 할 수 있습니다.
볼 연결 세트에는 1 개의 포인트 정렬 구속 조건, 3 개의 자유도는 있지만 모션 축 설정은 없습니다.
점 정렬 –이 구속 조건은 구성 요소가 회전하는 점을 정의합니다. 구속 조건은 단일 지점 간 정렬입니다. 정렬 참조로 기준점 또는 정점을 선택합니다.
원추 축 (선택 사항) –이 선택적인 구속 조건은 볼 연결의 동작 제한을 정의합니다. 원점 축을 정의하려면 두 개의 기준점 참조를 선택하십시오. 그런 다음 Cone Opening Angle을 지정하여 원뿔 반경을 정의하십시오. 볼 연결 동작은 결과 원뿔의 내부로 제한됩니다. 볼 연결이 정의 된 구성 요소의 현재 위치에 대한 각도를 지정할 수도 있습니다.
Weld Connection
강성 연결 세트와 마찬가지로 용접 연결 세트는 두 구성 요소가 서로에 대해 움직이지 않도록 연결하는 데 사용됩니다.
이러한 방식으로 연결된 구성 요소는 단일 본체가됩니다. 강성 연결 세트와 달리 용접 연결을 사용하면 하위 어셈블리를 엄격하게 구속 할 수 있지만 하위 어셈블리의 개방 자유도를 유지할 수 있습니다.
Bearing Connection
베어링 연결 세트는 4 개의 자유도를 가진 볼 및 슬라이더 연결의 조합입니다. 점을 참조 축에 연결하는 데 사용되므로 구성 요소가 1 자유도 및 3 자유 도로 축을 따라 이동합니다. 베어링 연결 세트에는 구속 조건 하나와 변환 축 설정 하나가 포함됩니다.
점 정렬 –이 구속 조건은 구성 요소가 정렬되고 회전하는 점과 축 사이의 연결을 정의합니다. 점 참조는 기준점 또는 정점 일 수 있습니다. 두 번째 참조는 모서리, 축 또는 곡선 일 수 있습니다.
변환 축 – 정렬 축을 따라 구성 요소의 위치를 정의합니다. 참조는 선택된 데이텀 포인트, 정점, 데이텀 평면 또는 평면 서피스 일 수 있습니다.
General Connection
사전 정의 된 특정 연결 세트가 메커니즘을 적절하게 정의하지 않는 경우 일반 연결 세트를 사용하여 모델을 연결할 때 원하는 자유도를 작성하십시오.
자유도를 결정한 후 배치 대시 보드에서 하나 또는 두 개의 배치 구속 조건을 선택하여 필요한 일반 연결 유형을 작성할 수 있습니다. 배치 구속 조건을 정의하면 여러 축 설정이 표시됩니다. 축 설정 유형 및 개수는 모델을 구속하는 데 사용 된 구속 조건의 개수 및 유형에 따라 다릅니다. 일반 연결을 정의 할 때 대부분의 Creo Parametric 구속 조건 및 관련 참조를 선택할 수 있습니다. 그러나 다음 제한 조건 유형을 사용하여 일반 연결을 정의 할 수 없습니다.
1) 비선형 커브 또는 비평면 표면의 점.
2) 탄젠시 구속 조건
'Creo > Creo 어셈블리' 카테고리의 다른 글
| 조립품에 대한 다중 구속 조건 세트 (0) | 2020.02.18 |
|---|---|
| 메카니즘 구속 조건 # 2/2 (3) | 2020.02.18 |
| Template > 파생 모델 생성을 위한 하향식 모델링 방법 (0) | 2020.02.15 |
| Top-down 디자인 과 메커니즘 연결 (0) | 2020.01.28 |
| IFX (Creo Intelligent Fastener) 분석 #2 (0) | 2020.01.25 |


