로보트 또는 자동화 장비를 개발 하는 업체가 Creo와 Unity를 이용한다면, 현실과 동일한 가상의 세계에서 제품을 실행 해보고, 미리 오류를 감지 할수 있지않을까요?
물리 엔진을 사용한 찰퇴 구현 동영상
네비Mech - 정의된 좌표계를 이동
여러곳에 목적지 좌표계를 위치 시키고, 정찰하는 로보트 입니다. 건물을 통과 하지 않고, 최적의 길을
찾아 갑니다.
Building a Traffic System
게임에서 많리 사용하는 Scene입니다. 왐별하지 않지만 이것을 활용하면 빌딩 주의의 교통 상황을 미리 구현
해볼수 있습니다. 사람과 빌딩, 자동차는 이미 라이브러리로 구현 되어 있습니다.
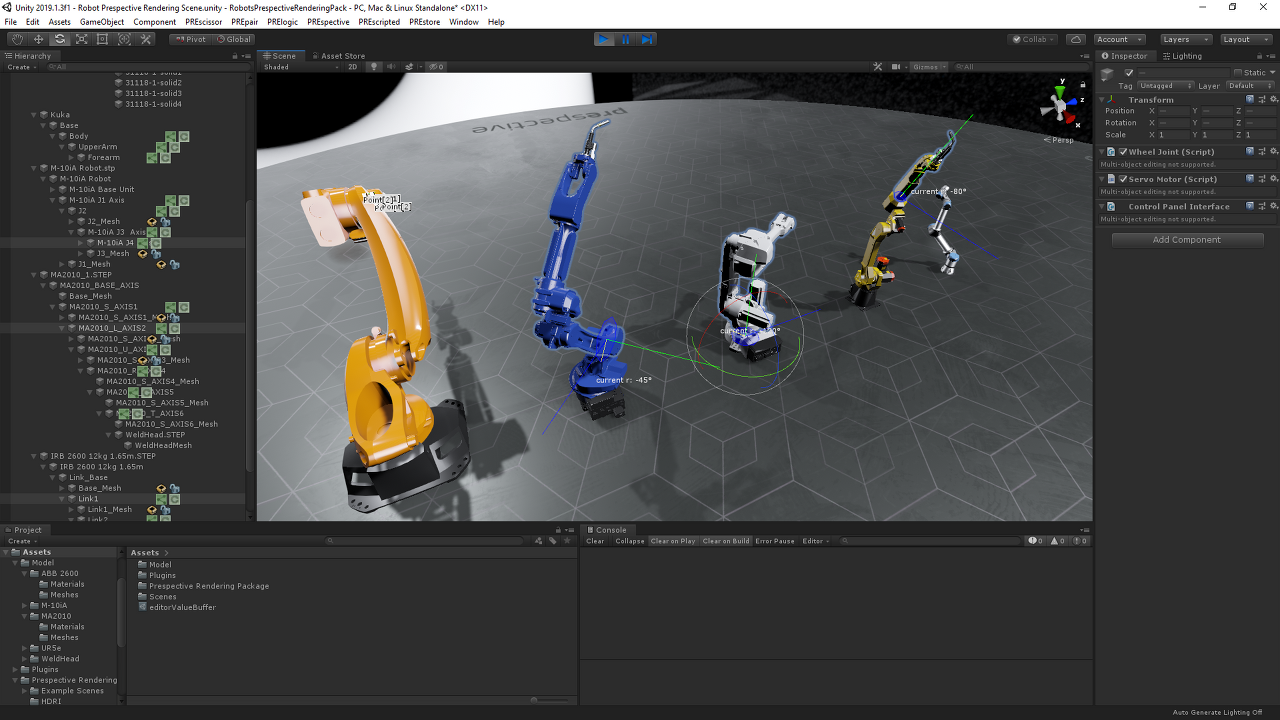
가상으로 제품을 구성해보고 동작을 확인 합니다. 로보트를 구성 하는 부품은 라이브러리로 되어 있고, 코딩을 통해
로보트 동작을 조정 합니다.
아직은 현실의 세계와 동일한 가상의 세계를 완벽히 구현 하지 못하지만, 점점 더 경험이 쌓이면 현실의 세계를
구현 하지 않을까요?
'Creo > AR _VR_MR' 카테고리의 다른 글
| Sketchup - 라이브 컴포넌트 (0) | 2020.11.21 |
|---|---|
| Creo, Sketch up & Unity, Unreal Engine (0) | 2020.11.20 |
| CREO와 유니티 (0) | 2020.09.23 |
| CAD 데이터를 MS 오피스 365에 추가하기 (0) | 2020.09.15 |
| 유니티 콘텐츠 - Toyota 사례 (0) | 2020.09.15 |



